หุ่นยนต์ที่ไม่แค่เก็บ แต่ “คิดก่อนจะลงมือ”
แรงงานภาคเกษตรกำลังหายากขึ้นทุกวัน แนวทางที่หลายคนจับตามองคือการใช้หุ่นยนต์มาช่วยเก็บเกี่ยวผลผลิตแบบอัตโนมัติ แต่ความท้าทายคือ หุ่นยนต์จะรู้ได้อย่างไรว่า
ควรเก็บผลไหน
จะเอื้อมเข้าไปอย่างไรไม่ให้โดนผลอื่นเสียหาย
โดยเฉพาะอย่างยิ่งกับพืชที่ออกผลเป็นพวงอย่างมะเขือเทศ
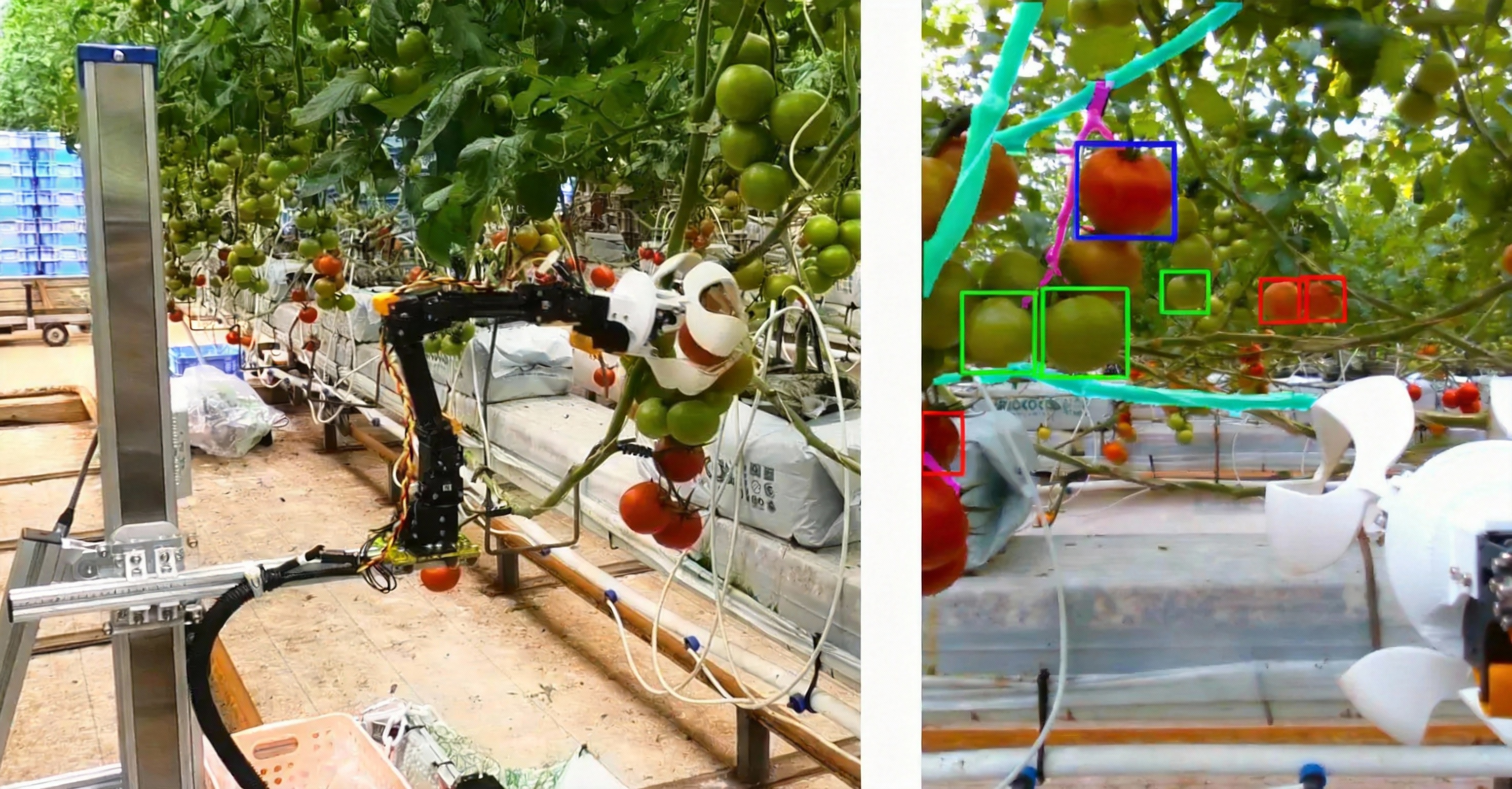
นักวิจัยจากญี่ปุ่นจึงพัฒนาหุ่นยนต์เกษตรที่สามารถ “คิดก่อนเก็บ” ไม่ได้พุ่งมือไปคว้าแบบสุ่ม ๆ แต่ใช้ AI และกล้องช่วยประเมินสถานการณ์ก่อนลงมือจริง ทำให้การเก็บมะเขือเทศมีประสิทธิภาพและปลอดภัยกับพวงผลไม้มากขึ้น
จากแค่ “ตรวจจับ” ไปสู่การ “ประเมินความง่ายในการเก็บเกี่ยว”
ผู้ช่วยศาสตราจารย์ Takuya Fujinaga จากมหาวิทยาลัย Osaka Metropolitan พัฒนาวิธีให้หุ่นยนต์ ประเมินโอกาสเก็บเกี่ยวสำเร็จของมะเขือเทศแต่ละลูกล่วงหน้า แนวคิดนี้เรียกว่า “คิดก่อนเก็บ”
หัวใจของระบบคือการผสาน
การจดจำภาพ (image recognition)
เข้ากับการวิเคราะห์เชิงสถิติ
เพื่อคำนวณว่าควรเข้าเก็บจากทิศทางไหนจึงจะมีโอกาสสำเร็จสูงที่สุด
AI จะวิเคราะห์ข้อมูลจากภาพหลายมิติ เช่น
รูปร่างและตำแหน่งของผลมะเขือเทศ
ตำแหน่งและรูปทรงของก้าน
มีใบไม้หรือส่วนอื่นของต้นไม้บดบังหรือไม่
เมื่อประมวลผลปัจจัยทั้งหมด ระบบจะช่วยให้หุ่นยนต์ ตัดสินใจเลือกมุมและท่าทางการเก็บที่รอบคอบมากขึ้น ลดความเสี่ยงทำให้ผลอื่นช้ำหรือขั้วขาด
โมเดลนี้ถือเป็นการขยับจากแนวคิดเดิมที่โฟกัสแค่
ตรวจเจอหรือไม่เจอผลไม้ (detection)
รู้หรือไม่รู้ว่านั่นคือมะเขือเทศ (recognition)
ไปสู่แนวคิดใหม่ที่ Fujinaga เรียกว่า “การประเมินความง่ายในการเก็บเกี่ยว” (harvest‑ease estimation) ซึ่งตอบโจทย์การใช้งานจริงในฟาร์มมากกว่า
เขาอธิบายว่า แนวคิดนี้พาเราก้าวข้ามจากคำถามง่าย ๆ ว่า
หุ่นยนต์เก็บมะเขือเทศได้ไหม
ไปสู่คำถามที่สำคัญกว่า
โอกาสเก็บสำเร็จมีมากน้อยแค่ไหน?
ซึ่งเป็นมุมมองที่สอดคล้องกับโลกจริงในภาคเกษตรกรรมมากกว่าแค่การตรวจจับวัตถุ
81% ความแม่นยำ และหุ่นยนต์ที่เปลี่ยนกลยุทธ์ได้เอง
ในการทดลอง ระบบของ Fujinaga ทำผลงานได้น่าประทับใจด้วยอัตรา เก็บเกี่ยวสำเร็จถึง 81% สูงกว่าที่คาดการณ์ไว้
ที่น่าสนใจคือ ประมาณ หนึ่งในสี่ ของการเก็บที่สำเร็จ เกิดขึ้นหลังจากที่หุ่นยนต์ลองเข้าเก็บจากด้านหน้าแล้วไม่สำเร็จ ก่อนจะปรับมุมไปเก็บจากด้านซ้ายหรือด้านขวาแทน
สิ่งนี้สะท้อนว่า
หุ่นยนต์ไม่ได้ทำงานแบบลองแล้วพลาดก็จบ
แต่มีการ ปรับกลยุทธ์เมื่อเจออุปสรรค
ผลวิจัยยังตอกย้ำว่า การให้หุ่นยนต์เก็บผลไม้จริง ๆ นั้นซับซ้อนมาก โดยมีหลายปัจจัยที่ส่งผลต่อความสำเร็จ เช่น
รูปแบบการออกผลเป็นพวง
รูปทรงและมุมของก้าน
ตำแหน่งของใบโดยรอบ
สิ่งกีดขวางต่าง ๆ ภายในพุ่ม
ทีมวิจัยจึงกำหนดให้ “ความง่ายในการเก็บเกี่ยว” เป็นตัวชี้วัดเชิงปริมาณใหม่ ที่หุ่นยนต์สามารถประเมินได้ล่วงหน้า ทำให้หุ่นยนต์เกษตรในอนาคต ตัดสินใจได้ฉลาดขึ้น ไม่ใช่แค่ทำตามคำสั่งแบบทื่อ ๆ
อนาคตฟาร์มไฮบริด: หุ่นยนต์ + มนุษย์ ทำงานร่วมกัน
Fujinaga มองภาพอนาคตที่ในฟาร์มหนึ่งแห่งจะมีทั้งมนุษย์และหุ่นยนต์ทำงานเคียงข้างกัน โดยหุ่นยนต์จะสามารถ
ประเมินเองว่าผลไม้ “พร้อมเก็บหรือยัง”
เลือกเก็บเฉพาะผลที่มี ความเสี่ยงต่ำและเก็บได้ง่าย
ในขณะที่มนุษย์จะเข้ามาจัดการกับ
ผลที่อยู่ในตำแหน่งยาก
เคสซับซ้อนที่ต้องใช้วิจารณญาณสูง
รูปแบบนี้จะนำไปสู่ โมเดลการเกษตรแบบใหม่ ที่ไม่ได้มองหุ่นยนต์เป็นตัวแทนมนุษย์ แต่เป็น “คู่หู” ในการทำงาน
สรุป: จาก AI วิเคราะห์ภาพ สู่ AI ที่เข้าใจความเสี่ยงในการลงมือ
สิ่งที่งานวิจัยนี้ทำได้โดดเด่นคือการยกระดับ AI ในภาคเกษตรจาก
แค่รู้ว่า “นี่คือมะเขือเทศ”
ไปสู่การเข้าใจว่า
“เก็บตอนนี้ดีไหม? โอกาสสำเร็จเท่าไหร่? ต้องเปลี่ยนมุมเข้าหาหรือเปล่า?”
ในมุมของคนทำเกษตรและคนทำงานด้าน AI นี่คือก้าวสำคัญที่เชื่อมโลกของ
การประมวลผลภาพ (Computer Vision)
เข้ากับการตัดสินใจเชิงกลยุทธ์ (Decision Making)
และอาจเป็นต้นแบบให้กับหุ่นยนต์เก็บเกี่ยวในพืชชนิดอื่นต่อไปในอนาคต ซึ่งไม่ใช่แค่เก่งในการมองเห็น แต่ เก่งในการประเมินสถานการณ์ก่อนลงมือจริง ด้วย